System Overview
Description
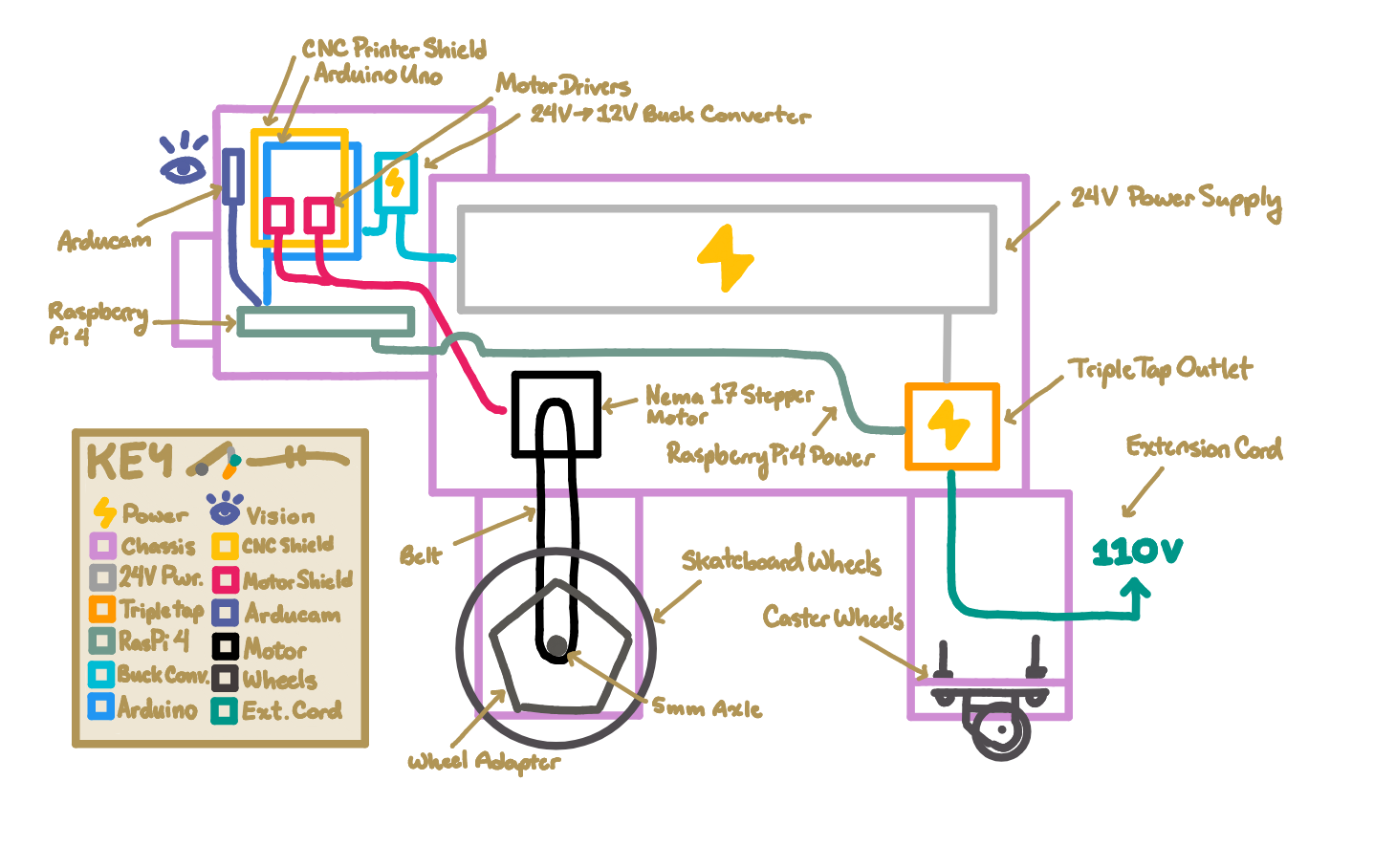
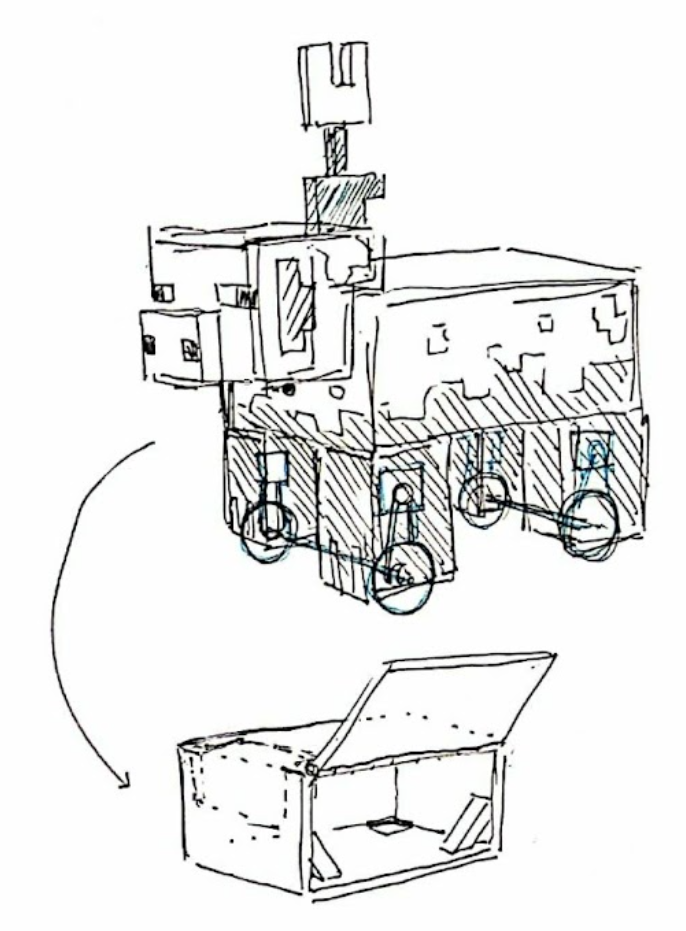
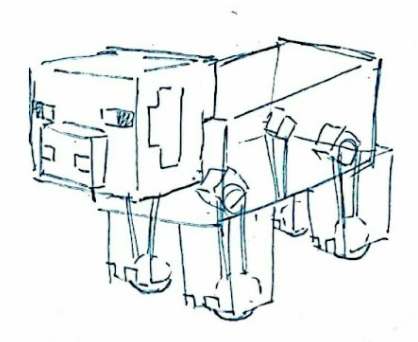
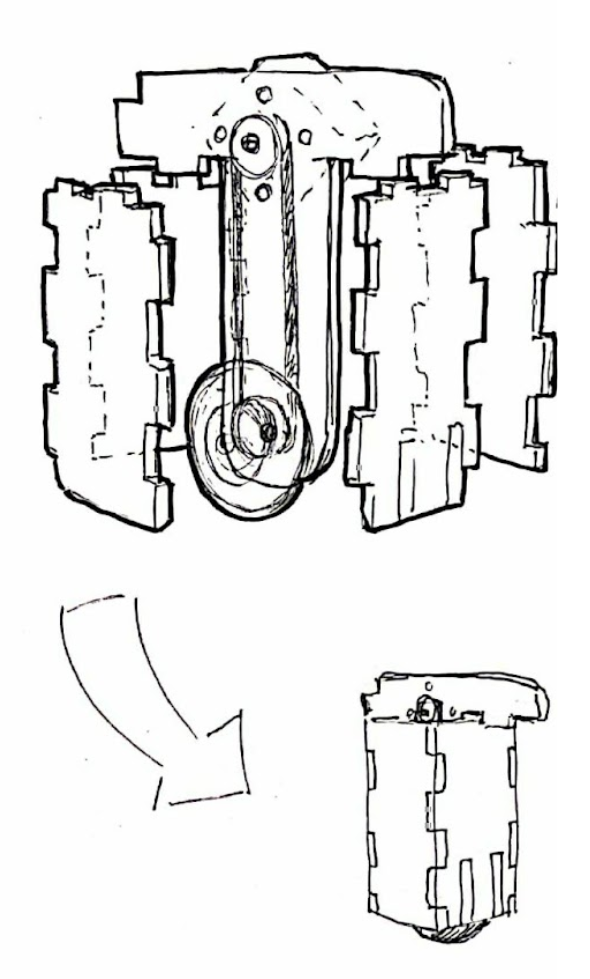
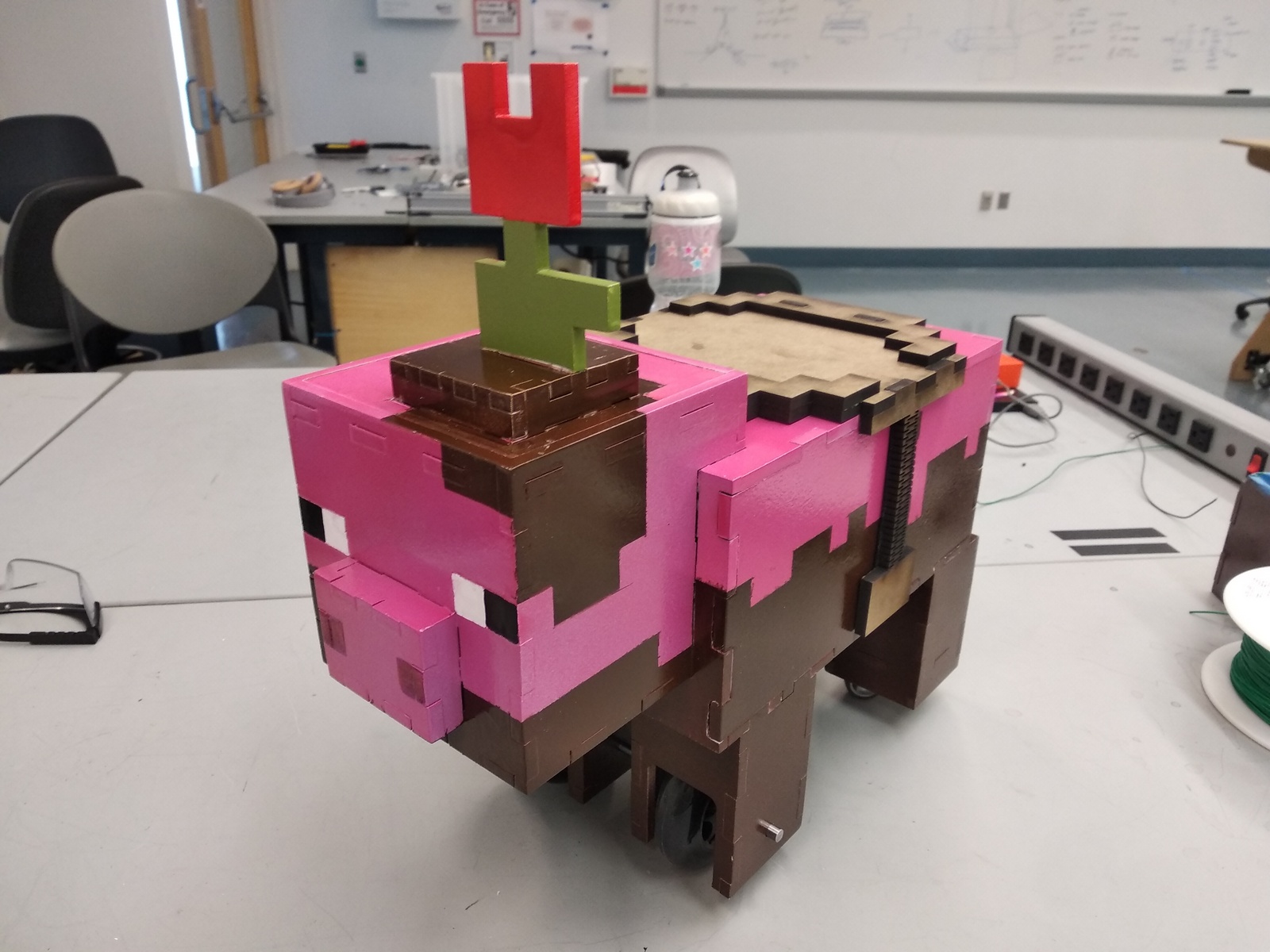
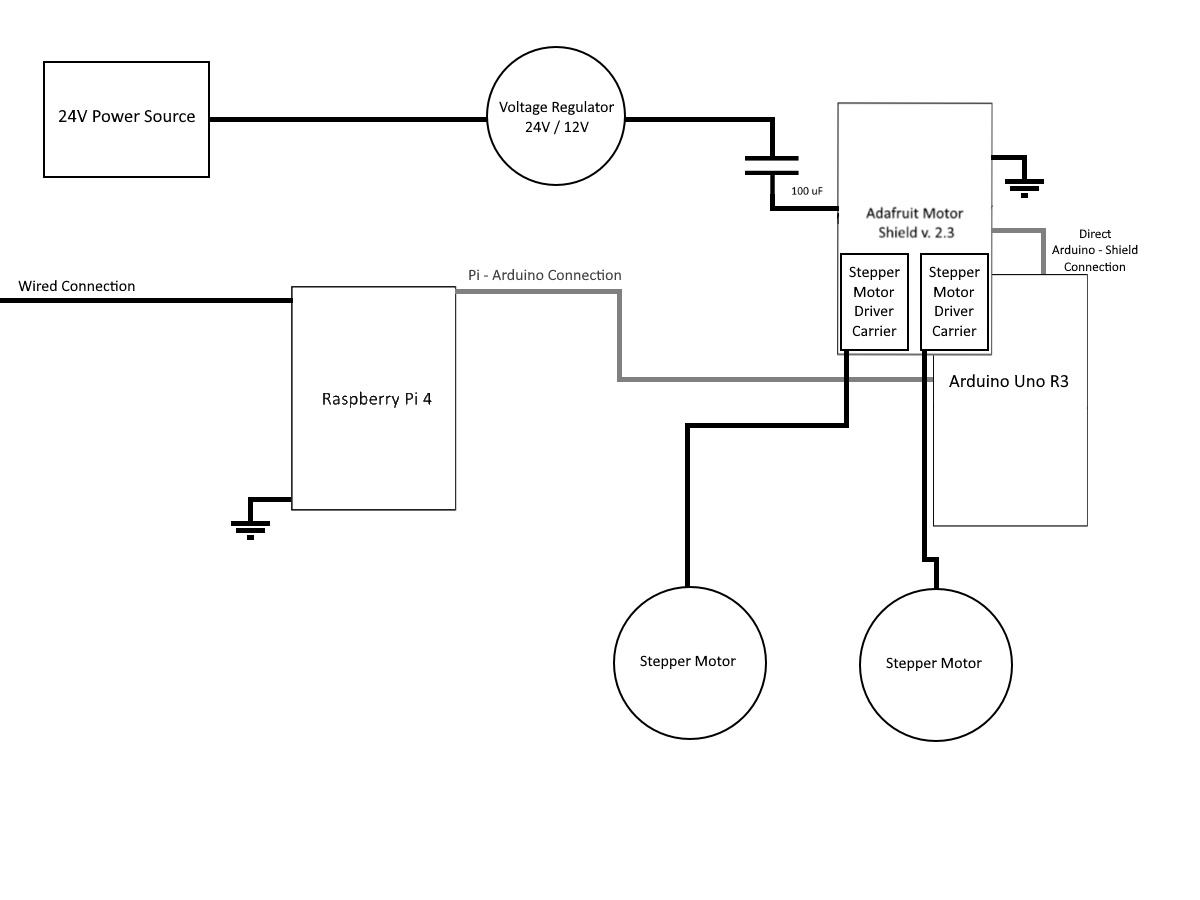
The fundamental principle of our project was to have a Minecraft Pig-esque robot follow an external input. Our final project uses a Python color-masking algorithm to isolate the color orange (the color of a carrot) hosted on a Raspberry Pi 4 connected to an Arducam, which it then follows using an Arduino Uno interface using belt driven Nema 17 stepper motors in its front legs.
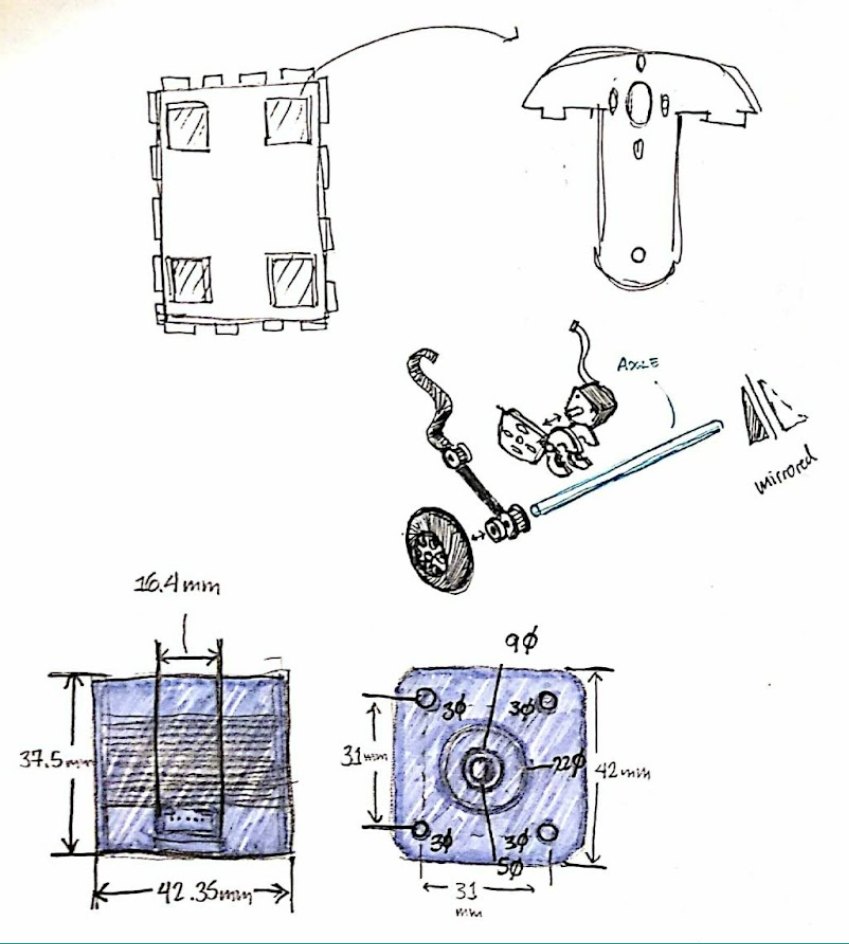
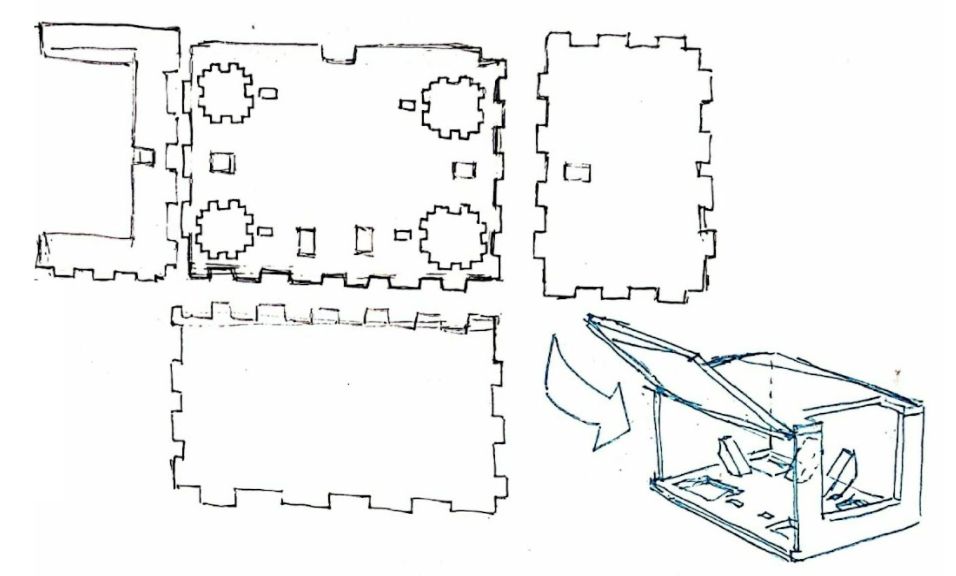
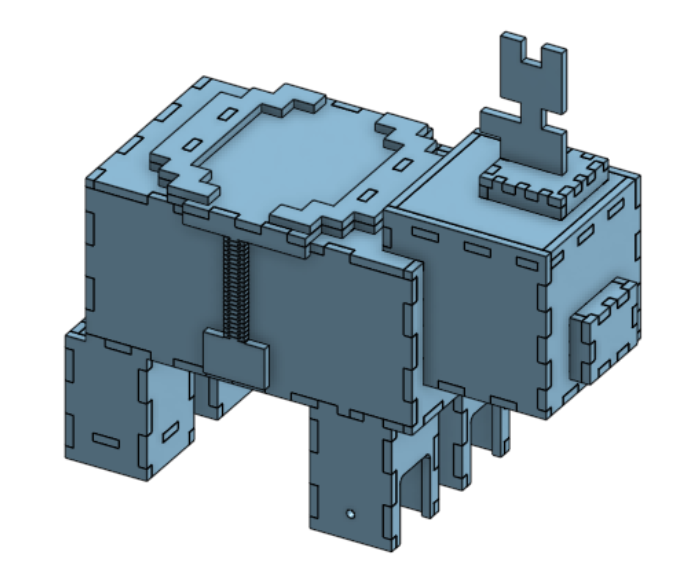
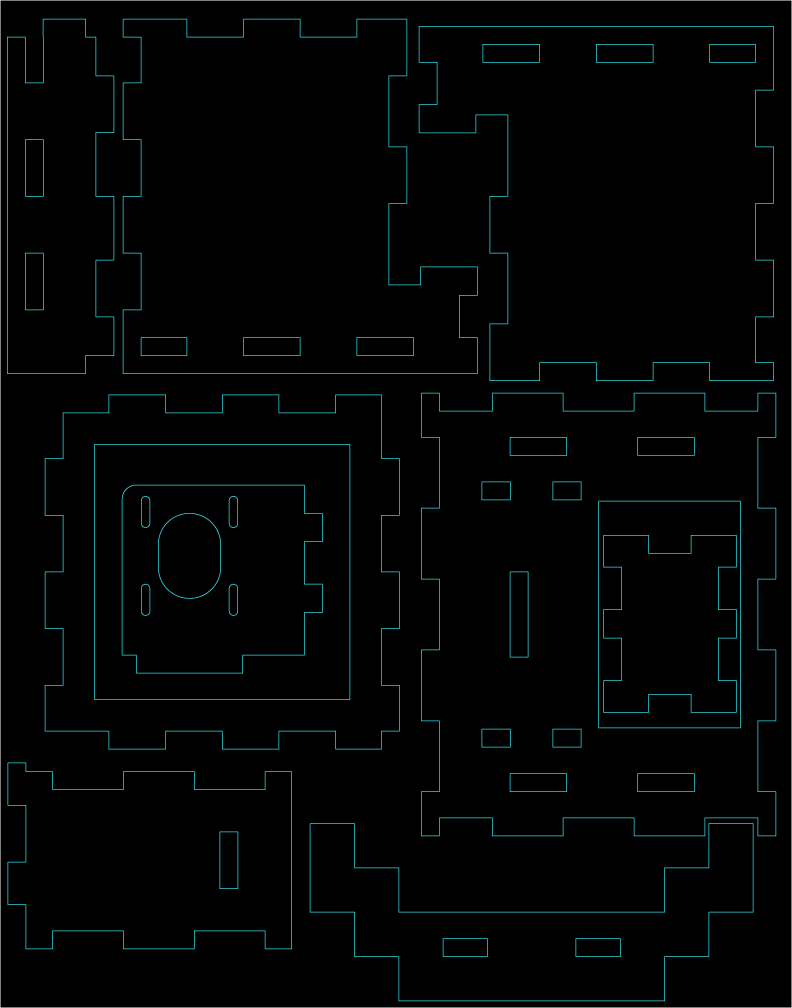
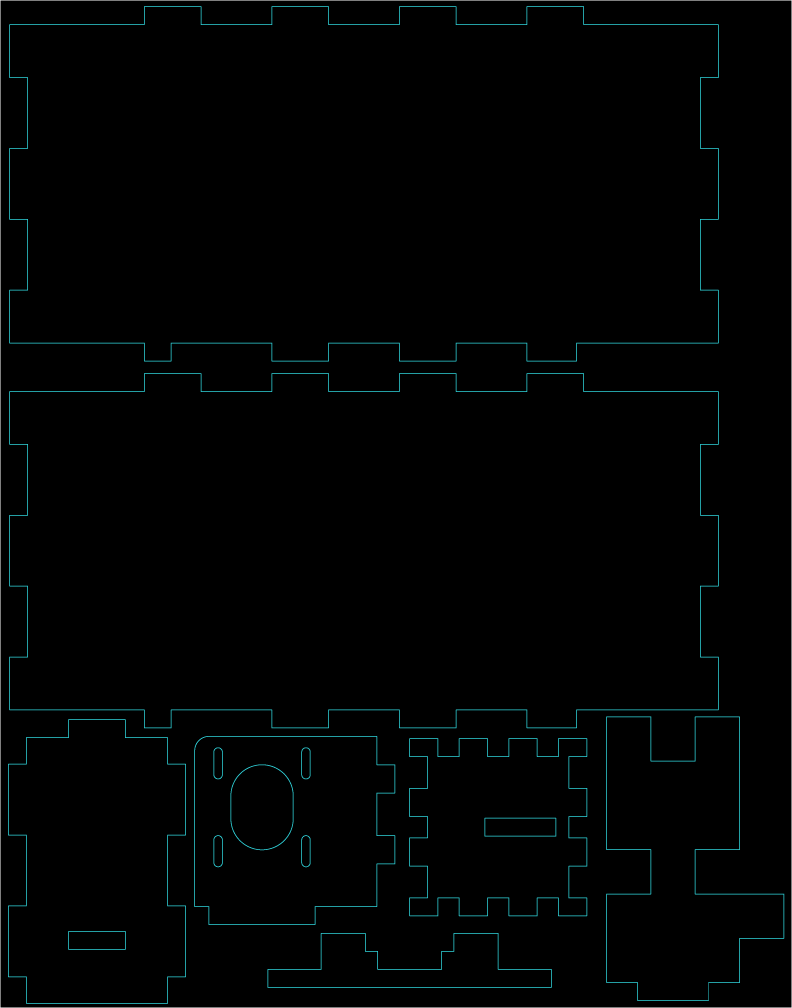
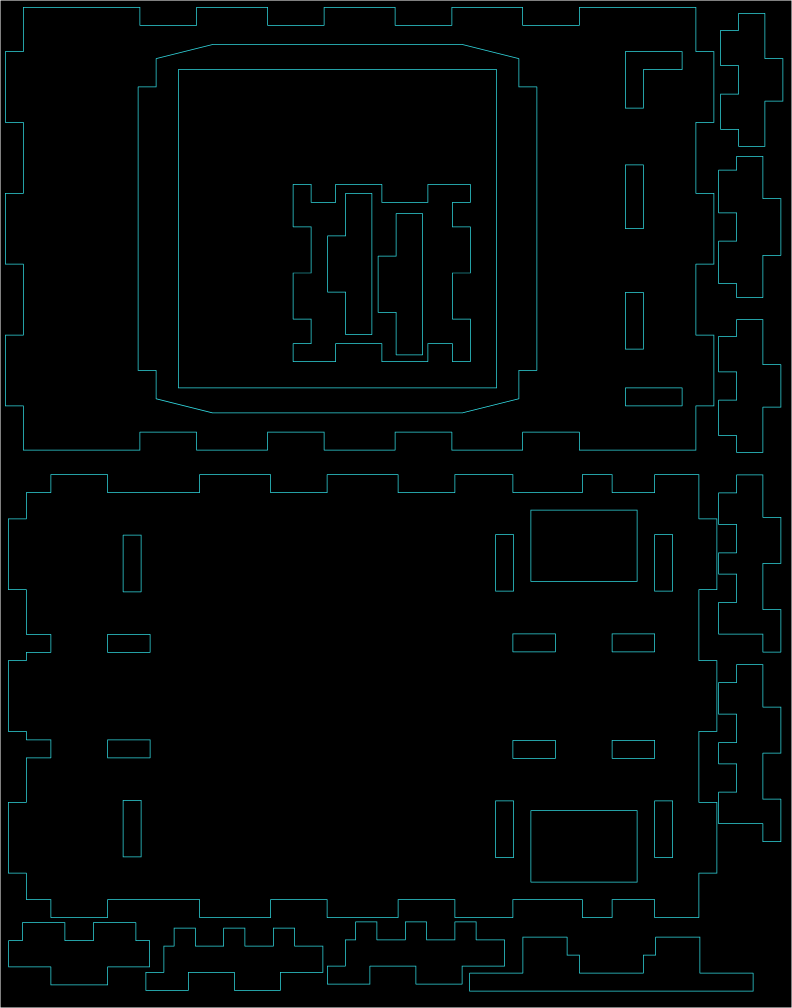
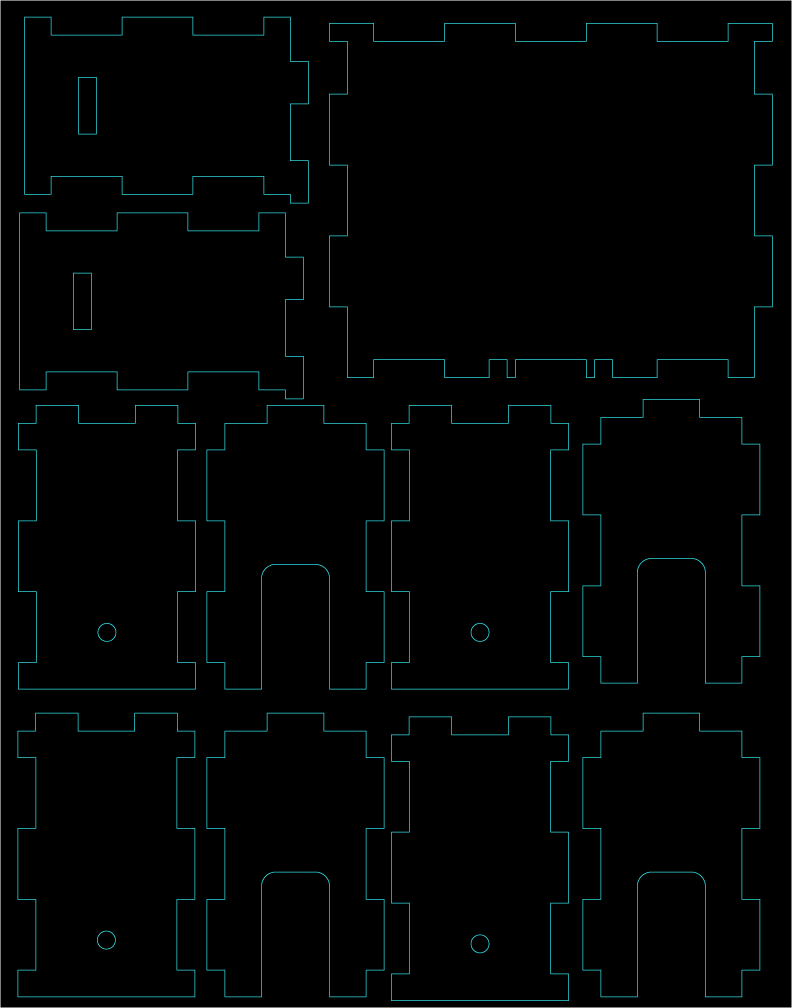
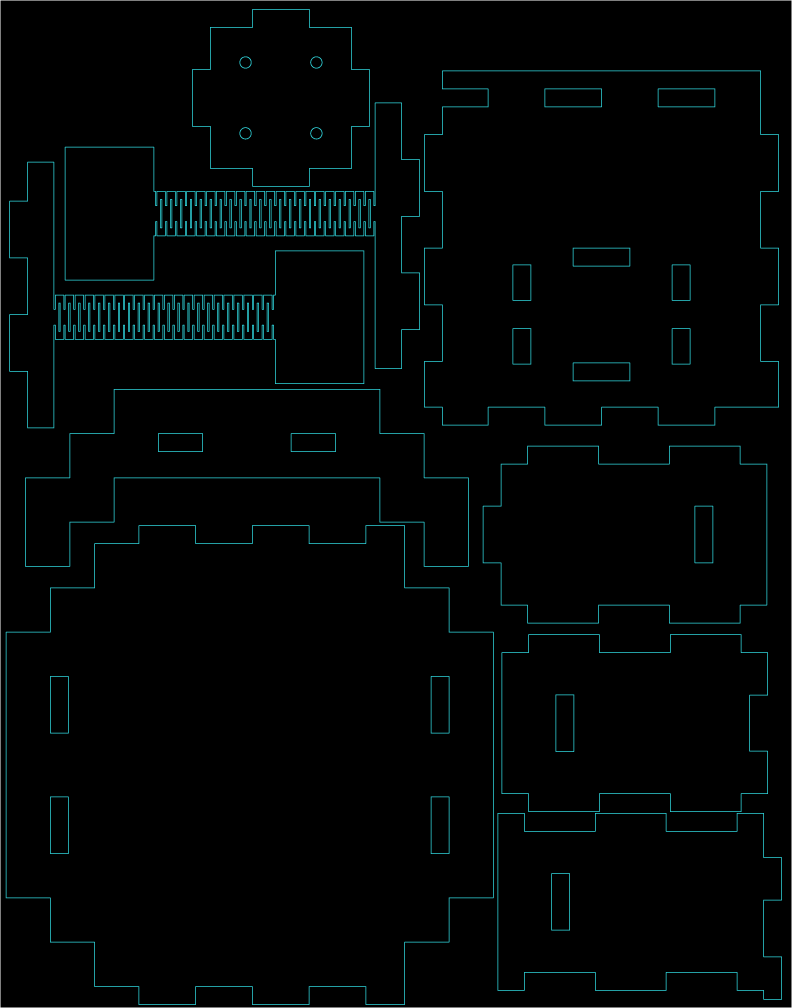
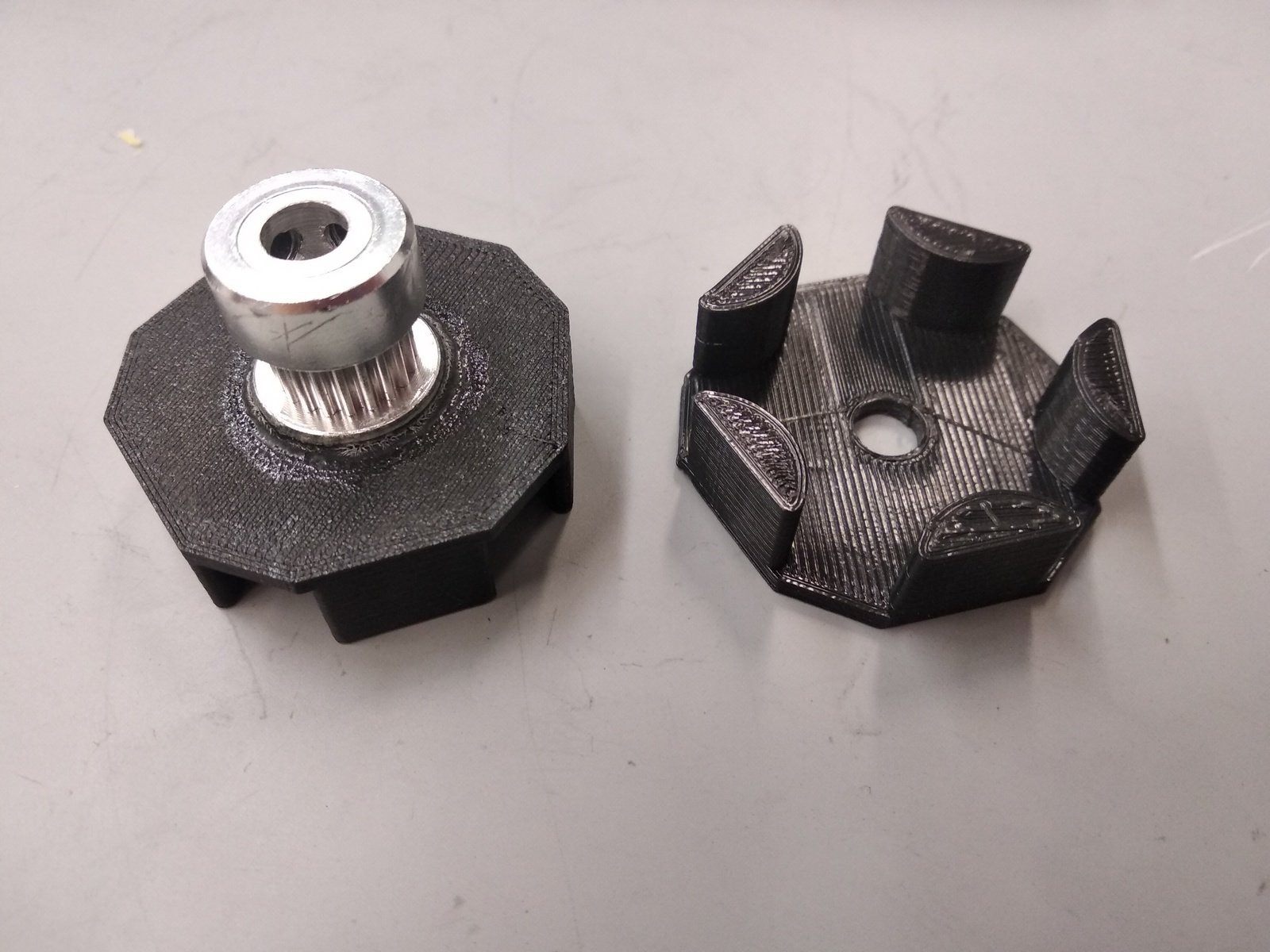
The chassis is at 1:4 scale to an actual-sized Minecraft Pig, and is constructed from spray-painted lasercut MDF fiberboard. Inside houses all of the electronics, including a 24V power supply, Arducam, Arduino, Raspberry Pi, motors, belts, and plugs. Out of the rear end is a cable which runs into a standard wall outlet to power the entire assembly, electrified using a 50-ft extension cord purchased from Home Depot.
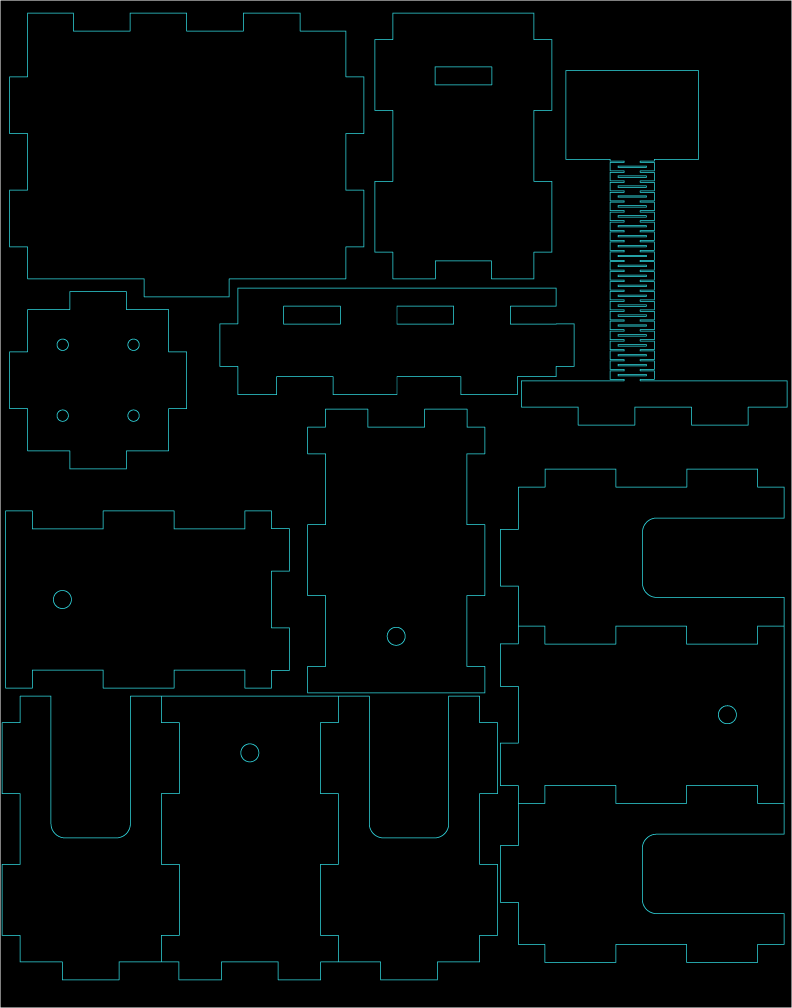
Much of our design process centered around what materials and supplies we already possessed in order to save money and shipping time. These pre-had items, including the 24V power supply, Nema stepper motors, Arduino, and skateboard wheels were a base on which we built the rest of the project. In addition, any manufacturing we had to do was chosen with speed in mind. This is why the chassis was lasercut and why we decided to build the pig smaller than 1:1 scale.